|
ROMAN SHIPWRECKS FROM THE WINE-DARK SEA The John C. Rouman Lecture Series in Classical and Hellenic Cultures 1 October 17, 2001 Anna Marguerite McCann |
|||
Using SCUBA (the Self-Contained Breathing Apparatus) invented in 1942 by Jacques-Yves Cousteau , Frederic Dumas, and Emile Gagnan, the archaeologist has only been able to skim the shallow fringes of the oceans to depths of under about 60 m. Now with Remotely Operated vehicles (ROV) scientists can search to depths of up to 6000 m. with camera, video and sonar wide areas of the sea floor in safety with speed and accuracy. 2 Or with the newest and much less expensive robotic tool, an Autonomous Underwater Vehicle (AUV), one can search to depths of 3000 m. 3 A new era for underwater archaeology has arrived. It has gone deep and it has gone technical. The challenge is successful collaborative research between archaeologists, engineers, conservators and oceanographers. Together we must practice selective, non-destructive archaeology, to discover new knowledge about our ocean planet while protecting our common maritime heritage.
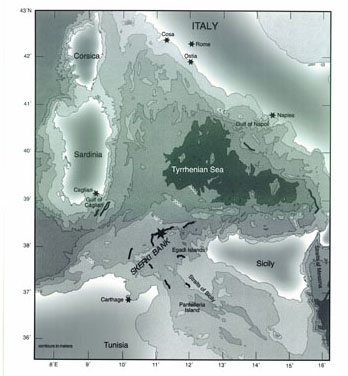
We returned again to the Skerki Bank site in 1997 with ROV Jason and also with the US Navy's NR-1 nuclear submarine. 5 In all, eight shipwrecks were located in an area of about 210 square nautical miles at a depth of about 800 m. The NR-1 was particularly useful in identifying the shipwreck sites with its powerful forward looking sonar that could spot ancient amphoras at a distance of 1000 m.6 Five of the wrecks found are Roman with one medieval fishing vessel and two nineteenth century wooden sailing ships. The Roman shipwrecks span a period of time from about 100 B.C. to 400 A.D, documenting a major trade route between ancient Carthage and Rome over the open seas. That there was a quick, direct route over the open ocean between North Africa and Rome has long been known. The Roman orator, Cato the Elder, in the first half of the second century B.C. showed the senate in Rome a fig that "had been picked at Carthage three days before" (Plin. HN 15.75). What scholars did not know before was that the route crossed over the treacherous Skerki Bank reef. This paper will focus on three of the Roman wrecks and their cargoes from Skerki Bank ranging in date from the first century B.C. to the fourth century A.D., covering the span of Roman trade. |
|||
|
1. I would like to thank the Committee for the Rouman lecture series for the opportunity to speak and particularly Mary and Christos Papoutsy for their generous hospitality that made my time at the University of New Hampshire such a happy and memorable one. My original talk was given with many slides and without a written text. So, I have tried here to document in footnotes some descriptions of the slides, as well as photograph references and further bibliography for key pieces. 2. For example, see description of ROV Jason in McCann and Freed 1994, pp. 95-97. ROV Jason, one of the most sophisticated ROV's in use today, can go to depths of 6000m. Jason is 2.2 m long, 1.2 m high and 1.1 m wide. It weighs 1200 kg in air and has a maximum speed of 2 knots. It is designed to be neutrally buoyant in water using a syntactic foam flotation unit and a light aluminum tube frame. Three titanium housings seal in the electronic circuitry so essential for its operation. Jason is powered by seven brushless DC electric thrusters that give it excellent maneuverability in all directions. Essential for Jason's archaeological work is the electrically controlled mechanical arm used to recover samples and artifact. It is operated from a rate joystick in the remote-control room of the mother vessel. Jason works in conjunction with a smaller towed unmanned camera sled named Medea. It serves as the support vehicle for the tethered, remotely operated Jason and as a relay station for signals between the main cables linking the two vehicles to a control room above on a dynamically positioned mother ship. The chief original designer of ROV Jason is Andy Bowen at the Deep Submergence Laboratory at Woods Hole who continues to develop its capabilities. Jason has recently been redesigned. The original cost of Jason was several million dollars. 3. The cheapest AUV today, mounted with a camera and sonar, I am told by Prof. Chryssostomos Chryssostomidis, director of the Ocean Engineering department and the Sea Grant AUV Lab at MIT, can be built for about $100,000. An AUV is thus much cheaper to build and to operate than a versatile ROV such as Jason. An AUV works totally independently from a mother ship and does not need cumbersome meters of cable as an ROV. An AUV can be launched from a small boat or shore and thus is also much more economical to operate. The disadvantage of an AUV is that the archaeologist does not have real- time contact and must wait for data. The AUVs being developed at MIT also are not as yet equipped for lifting. However, the AUV's are under continuous development and further survey capabilities are anticipated. |